预备知识
什么是“散列表/哈希表(hash table)”?
散列表/哈希表是用来存储“键值对”的一种容器。即key/value pairs,简称“K/V”。有了“散列表”,你可以很方便快速地通过 key 来获得 value。
如何实现散列表?
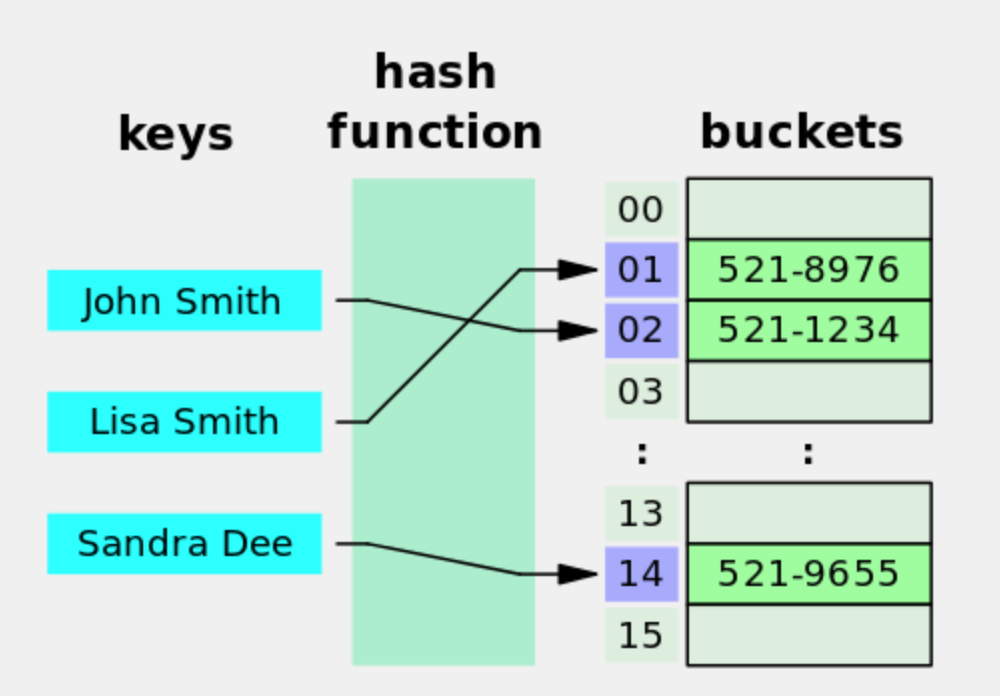
在散列表这种数据结构中,会包含 N 个 bucket(桶)。对于某个具体的散列表,N(桶的数量)通常是【固定不变】的。于是可以对每个桶进行编号,从 0 到 N-1。“桶”是用来存储“键值对”的,你可以把它通俗理解成一个动态数组,里面可以存放【多个】“键值对”。
下面展示了散列表的【查找】原理。当使用某个 key 进行查找,会先用某个散列函数计算这个key 的散列值。得到散列值通常是一个整数,然后用散列值对N(桶数)进行“取模”运算(除法求余数),就可以算出对应的桶编号。(注:取模运算是最常用的做法,但不是唯一的做法)
什么是“散列表”的【碰撞/冲突】(Collision)?
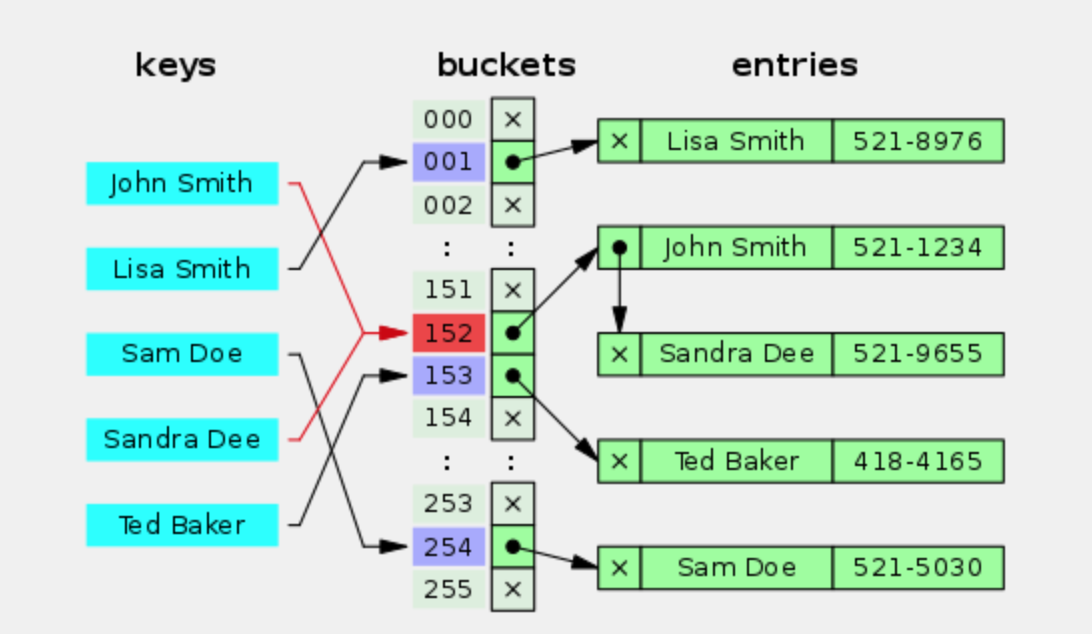
当两个不同的 key 进行哈希计算却得到【相同的散列值】,就是所谓的【散列函数碰撞】。一旦出现这种情况,这两个 key 对应的两个键值对就会被存储在【同一个】桶(bucket)里面。另一种情况是:虽然计算出来的散列值【不同】,但经过“取模运算”之后却得到【相同】的桶编号。这时候也会出现:两个键值对存储在一个桶里面。
如果某个哈希表在存储数据时【完全没有碰撞】,那么每个桶里面都只有 0个 或 1个 键值对。查找起来就非常快。反之,如果某个哈希表在存储数据时出现【严重碰撞】,就会导致某些桶里面存储了一大堆的键值对。将来查找 key 的时候,如果定位到的是这种“大桶”,就需要在这个桶里面逐一比对 key 是否相同——查找效率就会变得很差。
分布式散列表(DHT)概述
分布式散列表也称为“分布式哈希表”,英文是“distributed hash table”,简称 DHT。
“分布式散列表”在概念上类似与传统的“散列表”,差异在于——“传统的散列表”主要是用于单机上的某个软件中;“分布式散列表”主要是用于分布式系统(此时,分布式系统的节点可以通俗理解为散列表中的 bucket)。“分布式散列表”主要是用来存储大量的(甚至是海量的)数据。在实际使用场景中,直接对所存储的“每一个业务数据”计算散列值,然后用散列值作为 key,业务数据本身是 value。 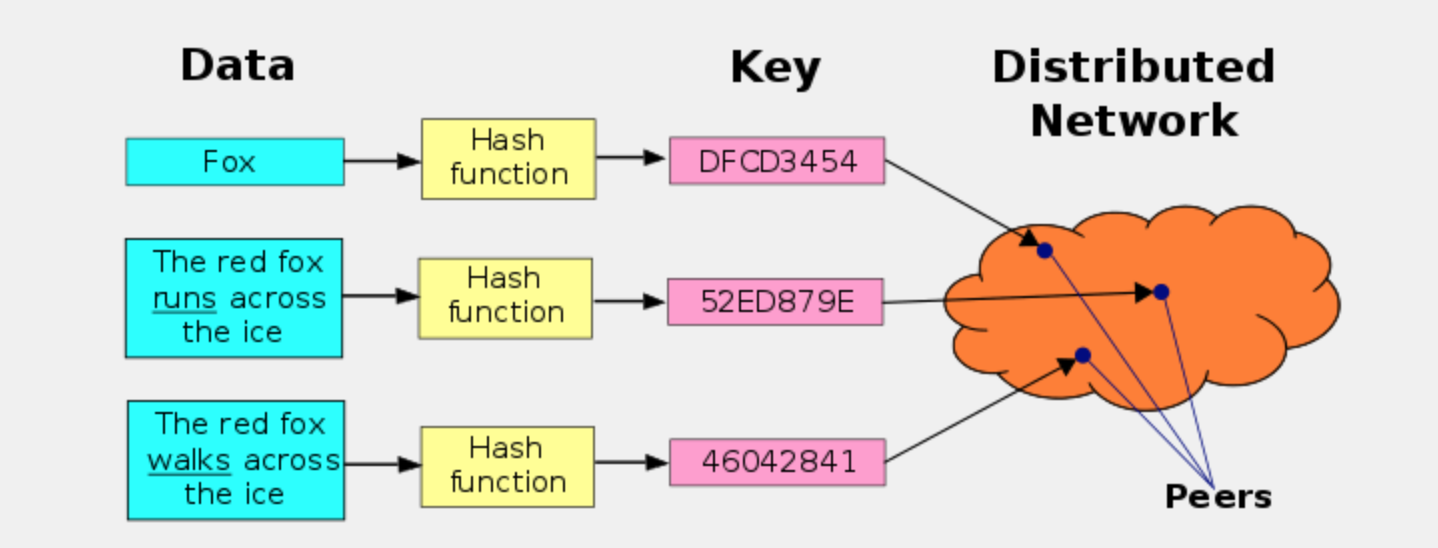
为什么会出现 DHT?
在 P2P 文件共享的发展史上,出现过3种不同的技术路线(三代)。
- 第1代采用【中央服务器】的模式——每个节点都需要先连接到中央服务器,然后才能查找到自己想要的文件在哪里。这种技术的最大缺点是——中央服务器成为整个 P2P 网络的【单点故障】。这类 p2p 的典型代表是 Napster。
- 第2代采用【广播】的模式——要找文件的时候,每个节点都向自己相连的【所有节点】进行询问;被询问的节点如果不知道这个文件在哪里,就再次进行“广播”......如此往复,直至找到所需文件。这种技术的最大缺点是——会引发“广播风暴”并严重占用网络带宽,也会严重消耗节点的系统资源。即使在协议层面通过设置 TTL(time to live),限制查询过程只递归 N 轮,依然【无法】彻底解决此弊端。这类 p2p 的典型代表是 Gnutella 的早期版本。
- 第3代采用的技术就是DHT。通过DHT, 不但避免了第一代技术的【单点故障】,也避免了第二代技术的【广播风暴】。
分布式散列表(DHT)的难点
“无中心”导致的难点
前面提到了 DHT 的诞生,是为了解决前面两代P2P技术的缺陷。其中一个缺陷是“中央服务器”导致的【单点故障】。因此 DHT 就【不能】再依靠中央服务器。而没有了中央服务器,就需要提供一系列机制来实现节点之间的通讯。
“海量数据”导致的难点
DHT 的很多使用场景是为了承载海量数据(PB或更高级别)。由于数据是海量的,每个节点只能存储(整个系统的)一小部分数据。需要把数据【均匀分摊】到每个节点。
“节点动态变化”导致的难点
很多 DHT 的使用场景是在公网(互联网)上,参与 DHT 的节点(主机)会出现【频繁变化】——每时每刻都有新的节点上线,也会有旧的节点下线。在这种情况下,需要确保数据依然是【均匀分摊】到所有节点。
(特别强调一下:传统的散列表在这种情况下的困难)前面提到:传统散列表所含的【桶数】是固定不变滴。因为传统散列表在针对 key 计算出散列值之后,需要用“散列值”和“桶数”进行某种运算(比如:取模运算),从而得到桶的编号。如果桶的数量出现变化,就会影响到上述“取模运算”的结果,然后导致数据错乱。
“高效查询”导致的难点
对于节点数很多的分布式系统,如何快速定位节点,同时又不消耗太多网络资源,这也是一个挑战。比如前面提到第二代 P2P 技术,在查找所需文件时会导致【广播风暴】。这就成为其致命弱点。DHT必须有更高效的查找机制。而且这种查找机制要能适应“节点动态变化”这个特点。
分布式散列表(DHT)如何解决上述难点?
DHT 采用如下一些机制来解决上述问题,并满足分布式系统比较苛刻的需求。
“散列算法”的选择
前面提到:DHT 通常是直接拿业务数据的散列值作为 key,业务数据本身作为 value。考虑到 DHT需要承载的数据量通常比较大,散列函数产生的“散列值范围”(keyspace)要足够大,以防止太多的碰撞。更进一步,如果keyspace【大到一定程度】,使得“随机碰撞”的概率小到忽略不计,就有助于简化 DHT 的系统设计。通常的 DHT 都会采用大于等于 128 比特的散列值(2128 比 “地球上所有电子文档总数” 还要大【很多数量级】)。
同构的“node ID”与“data key”
DHT 属于分布式系统的一种。既然是分布式系统,意味着存在【多个】节点(电脑主机)。在设计分布式系统的时候,一种常见的做法是:给每一个节点(node)分配【唯一的】ID。有了这个节点ID(nodeID),在系统设计上的好处是——对分布式系统所依赖的物理网络的【解耦】。很多 DHT 的设计会让“nodeID”采用跟“datakey”【同构】的散列值。这么搞的好处是:
- 当散列值空间足够大的时候,随机碰撞忽略不计,因此也就确保了 node ID 的唯一性
- 可以简化系统设计——比如简化路由算法(下面会提及)
“拓扑结构”的设计
作为分布式系统,DHT 必然要定义某种拓扑结构;有了拓扑结构,自然就要设计某种“路由算法”。如果某个 DHT 采用前面所说的——“node ID”与“data key”【同构】——那么很自然的就会引入“Key-based routing”。请注意,这【不是】某个具体的路由算法,而只是某种【风格】。采用这种风格来设计路由机制,好处是:key 本身已经提供了足够多的路由信息。当某个分布式系统具有自己的拓扑结构,它本身成为一个“覆盖网络”(洋文叫“Overlay Network”)。所谓的“覆盖网络”,通俗地说就是“网络之上的网络”。对于大部分 DHT而言,它们是基于互联网之上的“覆盖网络”,它们的数据通讯是依赖下层的互联网来实现的。前面提到的“nodeID”,其【解耦】的作用就体现在——分布式系统在设计拓扑结构和路由算法时,只需要考虑 node ID,而不用考虑其下层网络的属性(比如:协议类型、IP 地址、端口号)。
“路由算法”的权衡
由于 DHT 中的节点数可能非常多(比如:几十万、几百万),而且这些节点是动态变化的。因此就【不可能】让每一个节点都记录所有其它节点的信息。实际情况是:每个节点通常只知道少数一些节点的信息。这时候就需要设计某种路由算法,尽可能利用已知的节点来转发数据。“路由算法”这玩意儿很重要,直接决定了DHT的速度和资源消耗。在确定了路由算法之后,还需要做一个两难的权衡——“路由表的大小”。路由表越大,可以实现越短(跳数越少)的路由;缺点是:(由于节点动态变化)路由表的维护成本也就越高。路由表数越小,其维护成本越小;缺点是:路由就会变长(跳数变多)。
距离算法
某些 DHT 系统还会定义一种“距离算法”,用来计算:“节点之间的距离”、“数据之间的距离”、“节点与数据的距离”。请注意:此处所说的“距离”属于【逻辑层面】,对应的是 DHT 自己的拓扑结构;它与地理位置【无关】,也与互联网的拓扑结构【无关】。写到这里,某些聪明的读者就会明白:为啥前面要强调——“node ID”与“data key”【同构】。当这两者【同构】,就可以使用【同一种“距离算法”】;反之,如果这两者不同构,多半要引入几种不同的“距离算法”。
数据定位
DHT 与传统的散列表在【功能】上是类似的。说白了,他们最关键的功能只有两个——“保存数据”和“获取数据”。如果用 C 语言来表示的话,函数原型大致如下: 1
2void put(KEY k, VALUE v); // 保存“键值对”
VALUE get(KEY k); // 根据“键”获取“值”
保存数据
当某个节点得到了新加入的数据(K/V),它会先计算自己与新数据的key 之间的“距离”;然后再计算它所知道的其它节点与这个 key 的距离。如果计算下来,自己与key的距离最小,那么这个数据就保持在自己这里。否则的话,把这个数据转发给距离最小的节点。收到数据的另一个节点,也采用上述过程进行处理(递归处理)。
获取数据
当某个节点接收到查询数据的请求(key),它会先计算自己与 key 之间的“距离”;然后再计算它所知道的其它节点与这个key的距离。如果计算下来,自己与key的距离最小,那么就在自己这里找有没有 key 对应的 value。有的话就返回 value,没有的话就报错。否则的话,把这个数据转发给距离最小的节点。收到数据的另一个节点,也采用上述过程进行处理(递归处理)。
Chord 协议简介
拓扑结构——环形
要聊Chord的拓扑,必然要提到“ConsistentHashing”(译作:“一致散列”或“稳定散列”)。搞明白“一致散列”也就知道 Chord 的拓扑设计了。提出“一致散列”这个概念主要是为了解决“节点动态变化”的难点(前面有提及)。为了解决这个难点,“一致散列”把散列值空间(keyspace)构成一个【环】。对于 m 比特的散列值,其范围是[0,2m-1]。你把这个区间头尾相接就变成一个环,其周长是 2m。然后对这个环规定了一个移动方向(比如顺时针)。如果 node ID 和 data key 是同构的,那么这两者都可以映射到这个环上(对应于环上的某点)。
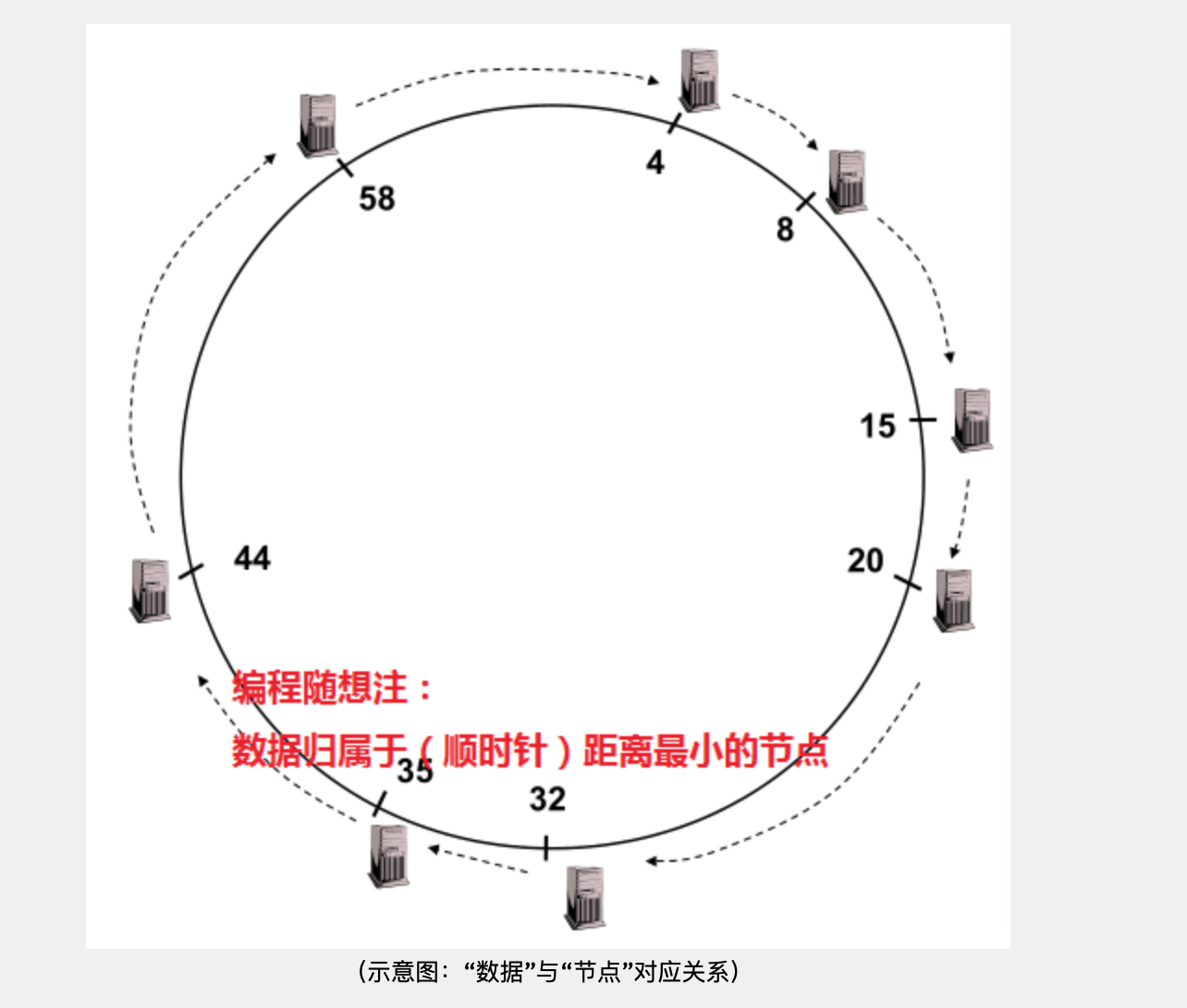
假设有某个“节点A”,距离它最近的是“节点B”(以顺时针方向衡量距离)。那么称B是A的【继任】(successor),A 是 B的【前任】(predecessor)。数据隶属于【距离最小】的节点。以 m = 6 的环形空间为例:
- 数据区间 [5,8] 隶属于“节点8”
- 数据区间 [9,15] 隶属于“节点15”
- ......
- 数据区间 [59,4] 隶属于“节点4”(注:“6比特”的环形空间,63之后是0)
路由机制
基本路由(简单遍历)
当收到请求(key),先看 key 是否在自己这里。如果在自己这里,就直接返回信息;否则就把 key 转发给自己的继任者。以此类推。这种玩法的时间复杂度是:O(N)。对于一个节点数很多的 DHT 网络,这种做法显然【非常低效】。
高级路由(Finger Table)
由于“基本路由”非常低效,自然就引入更高级的玩法——基于“Finger Table”的路由。“Finger Table”是一个列表,最多包含 m 项(m 就是散列值的比特数),每一项都是节点 ID。假设当前节点的 ID 是 n,那么表中第 i 项的值是:successor( (n + 2i) mod 2m ) 当收到请求(key),就到“Finger Table”中找到【最大的且不超过 key】的那一项,然后把 key 转发给这一项对应的节点。有了“Finger Table”之后,时间复杂度可以优化为:O(log N)。
节点的加入
- 任何一个新来的节点(假设叫 A),需要先跟 DHT 中已有的任一节点(假设叫 B)建立连接。
- A随机生成一个散列值作为自己的 ID(对于足够大的散列值空间,ID 相同的概率忽略不计)
- A通过跟 B 进行查询,找到自己这个 ID 在环上的接头人。也就是——找到自己这个 ID 对应的“继任”(假设叫 C)与“前任”(假设叫 D)
- 接下来,A 需要跟 C 和 D 进行一系列互动,使得自己成为 C 的前任,以及 D 的继任。
这个互动过程,大致类似于在双向链表当中插入元素
节点的【正常】退出
如果某个节点想要主动离开这个DHT网络,按照约定需要作一些善后的处理工作。比如说,通知自己的前任去更新其继任者......这些善后处理,大致类似于:在双向链表中删除元素。
节点的【异常】退出
作为一个分布式系统,任何节点都有可能意外下线(也就是说,来不及进行善后就挂掉了)假设节点A的继任者【异常】下线了,那么 节点A就抓瞎了。为了保险起见,Chord引入了一个“继任者候选列表”的概念。每个节点都用这个列表来包含:距离自己最近的 N 个节点的信息,顺序是【由近到远】。一旦自己的继任者下线了,就在列表中找到一个【距离最近且在线】的节点,作为新的继任者。然后节点A 更新该列表,确保依然有N个候选。更新完“继任者候选列表”后,节点A也会通知自己的前任,那么A的前任也就能更新自己的“继任者候选列表”。
reference from https://program-think.blogspot.com/2017/09/Introduction-DHT-Kademlia-Chord.html#head-6