DRAW: A Recurrent Neural Network For Image Generation
- Category: Article
- Created: February 8, 2022 3:44 PM
- Status: Open
- URL: https://arxiv.org/pdf/1502.04623.pdf
- Updated: February 15, 2022 6:35 PM
Highlights
- DRAW networks combine a novel spatial attention mechanism that mimics the foveation of the human eye, with a sequential variational auto-encoding framework that allows for the iterative construction of complex images.
- Where DRAW differs from its siblings is that, rather than generating images in a single pass, it iteratively constructs scenes through an accumulation of modifications emitted by the decoder, each of which is observed by the encoder.
Methods
DRAW Network
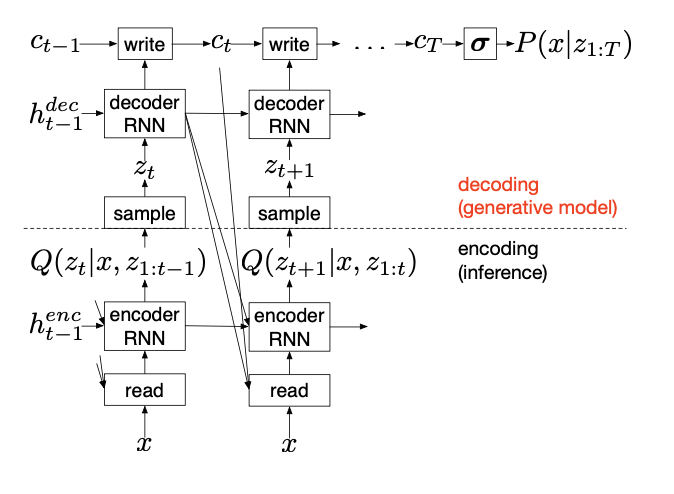
- Firstly, both the encoder and decoder are recurrent networks in DRAW, so that a sequence of code samples is exchanged between them; moreover the encoder is privy to the decoder’s previous outputs, allowing it to tailor the codes it sends according to the decoder’s behaviour so far.
- Secondly, the decoder’s outputs are successively added to the distribution that will ultimately generate the data, as opposed to emitting this distribution in a single step.
- modified by the decoder.
\[ \begin{aligned}\hat{x}_{t} &=x-\sigma\left(c_{t-1}\right) \\r_{t} &=\operatorname{read}\left(x_{t}, \hat{x}_{t}, h_{t-1}^{d e c}\right) \\h_{t}^{e n c} &=R N N^{e n c}\left(h_{t-1}^{e n c},\left[r_{t}, h_{t-1}^{d e c}\right]\right) \\z_{t} & \sim Q\left(Z_{t} \mid h_{t}^{e n c}\right) \\h_{t}^{d e c} &=R N N^{d e c}\left(h_{t-1}^{d e c}, z_{t}\right) \\c_{t} &=c_{t-1}+w r i t e\left(h_{t}^{d e c}\right)\end{aligned} \]
Selective Attention Model
- Given an A × B input image x, all five attention parameters are dynamically determined at each time step via a linear transformation of the decoder output \(h^{dec}\).
\[ \left(\tilde{g}_{X}, \tilde{g}_{Y}, \log \sigma^{2}, \log \tilde{\delta}, \log \gamma\right)=W\left(h^{d e c}\right) \]
The grid centre \((g_x,g_y)\) and stride \(\delta\) (both of which are real-valued) determine the mean location \(\mu_X^i,\mu_Y^j\) of the filter at row \(i\) and column \(j\) in the patch as follows:
\[ \begin{array}{l}\mu_{X}^{i}=g_{X}+(i-N / 2-0.5) \delta \\\mu_{Y}^{j}=g_{Y}+(j-N / 2-0.5) \delta\end{array} \]
Given the attention parameters emitted by the decoder, the horizontal and vertical filter bank matrices \(F_x\) and \(Fy\) (dimensions N × A and N × B respectively) are defined as follows:
\[ \begin{array}{l}F_{X}[i, a]=\frac{1}{Z_{X}} \exp \left(-\frac{\left(a-\mu_{X}^{i}\right)^{2}}{2 \sigma^{2}}\right) \\F_{Y}[j, b]=\frac{1}{Z_{Y}} \exp \left(-\frac{\left(b-\mu_{Y}^{j}\right)^{2}}{2 \sigma^{2}}\right)\end{array} \]
Code
1 | def filterbank(gx, gy, sigma2,delta, N): |
Conclusion
- Variational Autoencoder
- a pair of recurrent neural networks for encoder and decoder
- Iteratively constructs scenes through an accumulation of modifications emitted by the decoder.
- a dynamically updated attention mechanism is used to restrict both the input region observed by the encoder, and the output region modified by the decoder.