分布式系统和传统的单机系统不同,彼此是通过网络而不是”主板”连接、消息通讯是不可靠的。因此如果没有任何同步机制,同一系统的成员之间无法确保时间戳的误差控制在某个范围内。这个基本条件的缺失,会给上层应用的设计带来很多的麻烦。比如,一个业务流程的两个阶段分别在两台机器上处理,而后在第三台机器上将处理记录join起来,就可能因为时间戳的问题引发混乱。如何做好时间同步的协议,成为了分布式系统中的一个基本的问题。
在系统对时的时候,有两类基本的协议,第一个是外部对时,简单的说,就是整个分布式系统中的所有成员,与外部某个指定的源头进行时间同步,确保与源头的时间的diff在某个误差范围\(D\)内; 另一种是内部对时,即内部通过广播等各种手段,确保系统内的成员俩俩间的时间误差在一定范围内。从这里可以看出,如果一个集群使用了外部对时,控制误差在\(D\)以内,那么这个集群内部的时间的误差,也一定能够控制在\(2D\)的范围内。但反过来不一定,因为有可能整个集群与外部的时间存在很大的整体偏差,尽管在内部彼此的偏差很小。
那么如何进行时间的同步呢?这里介绍两个经典的协议:Cristian和NTP。
Cristian
Cristian的基本过程是这样的,假定现在P进程要从授时服务器S获取时间,那么最朴素的做法就是P向S发送请求,S将自己的时间t返回给P,而后P设置自己的时间为t。这个做法存在一个很关键的问题,就是由于网络的通讯时间是不确定的,P拿到t的时候,已经经过了不确定多久了,无法估计结束后P与S的时间误差范围。因此,我们需要将网络通讯的时间,即RTT(Rount Trip Time)也考虑进来。在这个场景下,RTT指的是P进程发出请求,到得到S的回应消息的时间差,这个时间差是P进程自己可以记录求得的。假定我们知道从 \(P \to S\)的最小延时是 \(min_1\), \(S \to P\)的最小延时是\(min_2\),那么,我们可以推断,真实的时间在\([t+min_2, t+RTT-min_1]\)间内,Cristian的做法就将对时结果设置为:\(t'=t+\frac{RTT+min_2-min_1}{2}\) 这个中间位置上。那么,其误差就能控制在\(\pm \frac{RTT-min_1-min_2}{2}\) 的范围内。
NTP
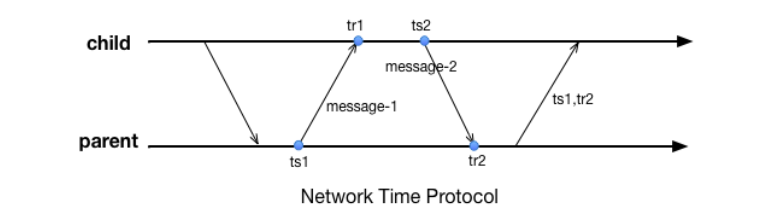
另外一个知名的时间同步协议是NTP,全称Network Time Protocol。NTP协议一般在某个大的机构内部署,将机构内的设备组织成树形结构,每个节点都从父节点处获取时间。整个同步过程分为两轮,第一轮父节点记录自己发送返回的时间点\(ts_1\),子节点记录自己接收到返回消息的时间 \(tr_1\);而后第二轮,子节点记录自己的发送时间\(ts_2\);;父节点记录收到请求的时间\(tr_2\)后将\(ts_1\) 和 \(tr_2\)返回。那么子节点可以计算出自己和父节点之间的时间偏差为: \(o=\frac{(tr_{1}-tr_{2}+ts_{2}-ts{1})}{2}\),并以此为依据进行修正(一般需要确保时间不能“倒流”)。那么为什么\(o\)是这么计算呢?假定子节点与父节点的时间偏差(offset)为\(o\prime\)、父节点往子节点的通讯时延为\(L_1\)、子节点往父节点的通讯时延为\(L_2\),那么:
\[ \begin{align*} & tr_{1}=ts_{1}+L_{1}+o' \\ & tr_{2}=ts_{2}+L_{2}-o' \\ \end{align*} \]
相减可以得到: \[o'= \frac{(tr_1-tr_2+ts_2-ts_1)}{2} + \frac{(L_2 - L1)}{2} = o + \frac{(L_2-L1)}{2}\]
因此:
\[ \lvert o'-o \rvert \leqslant \lvert \frac{(L_2-L_1)}{2}\rvert < \frac{(L_{1}+L_{2})}{2} = \frac{RTT}{2} \]
由此可知o的这个值也在RTT相关的一个误差范围内,是可估计的。 从上面两个协议可以看出,对时的误差是与RTT强相关的。由于消息的传递受制于光速、距离越远时间准确度的保证就越差。对于那些假定了时间误差在某个范围内的分布式协议,在跨越距离很大的时候,我们就必须要将这个误差对系统的影响考虑在内,这将显著增加分布式系统设计的复杂度、或者影响设计出来的系统的吞吐(尤其是有高一致性要求的事务型系统)。
最后,不论是Cristian还是NTP,都只描述了一次对时如何将时间的偏移(clow skew)控制在一定范围内。由于不同机器的时钟的行进速度(clock drift)是不同的,因此我们需要每隔一段时间,进行一次修正,以消除时钟节奏不同的影响。多久需要做一次同步呢? 这个做一个简单的计算就可以得到。假定系统整体时钟的行进速率与标准时钟的速率小于MDR(Max Drift Rate, 一般由时钟的实现方式决定),那么系统内俩俩时钟的行进速率差小于2MDR。如果我们要求系统内时间差不能超过M,那就必须以不低于\(\delta = \frac{M}{2 \times {MDR}}\)的间隔进行时间同步。在现实的系统中,我们需要计算合理的M,以避免系统内出现过多的时间同步消息。
在上面部分,我们谈到了分布式系统里进程彼此的物理时间是如何进行同步的,并介绍了一些经典的时间同步算法。但静下心来仔细想想,我们希望进行时间同步,很多时候是希望不同的进程,对系统内事件的顺序达成一致。至于是否是使用真实世界的那个时间来排序,往往并不是那么重要。 那么,如何在一个分布式系统中,对发生在众多节点上的事件进行定序呢?目前已知的做法包括以下几种:
- 使用物理时间同步的方法,确保众多节点的时间偏差在某个范围内。而后记录事件的发生时间及理论误差范围,比如将每个事件的发生时间登记为\((t \pm \Delta)\)如果两个事件的时间范围没有overlap,那么就自然的可以排序判断;否则,则需要引入一个新的排序规则(比如以节点id),对这两个事件约定一个排序。spanner中采用了这种方式。
- 采用Lamport Timestamp及其引申算法进行定序,确保事件满足causality consistency的性质,成为后续更高层次的分布式算法设计的基础。本文后面主要将展开这类算法,并引出分布式系统中一些基础概念。这些基础概念是理解分布式共识问题(consensus problem)的基础。
Lamport
为明确这个问题,我们首先需要先对事件的序(happen-before)做出一个定义。在Lamport的体系中,事件的先后关系是按照如下原则设定的:
- 规则一:如果A、B两个事件都发生在同一个进程内,那么,A、B之间的序自然可以由这个进程给出。假如进程先执行了A后执行了B,那么可以说A在B之前发生,记为\(A \prec B\);
- 规则二:如果进程x往进程y发送了一条消息M;设在进程x的消息发送事件为A,进程y收到消息的事件为B,则显然我们应当认为A在B之前发生,同样记为\(A \prec B\).
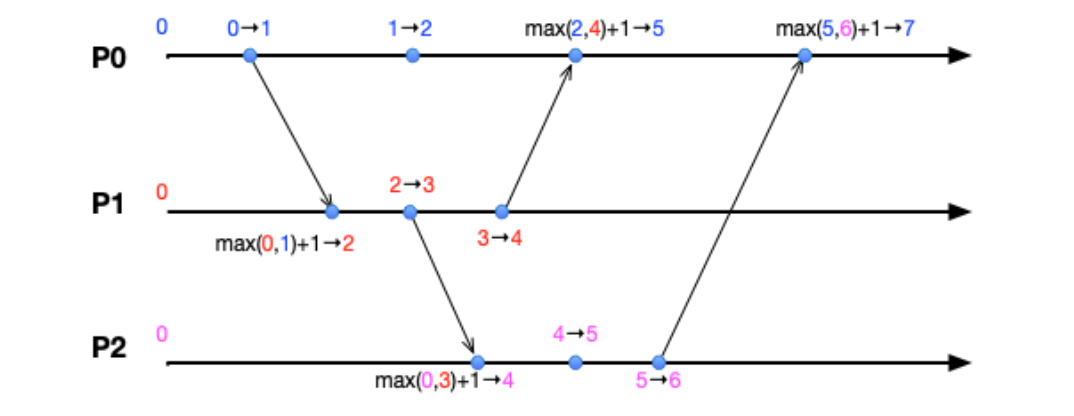
由此引出了Lamport timestamp的算法,这个算法就是一种给事件打上逻辑时间戳、确保其满足causality的基本属性。这个算法的基本过程为:
- 每个进程都记录自己的一个当前时间戳,初始的时候,大家都是0
- 如果进程内部发生了一个新的事件,那么将当前时间戳记为 \(t'=t+1\),并认为事件发生于\(t'\)时刻
- 如果进程A向进程B通讯,则发送消息的时候,进程A的时间戳\(t'\_A = t_A + 1\)并随消息发送到B,B更新自己的时间戳为\(t'\_B = max(t'\_B, t'\_A) + 1\).
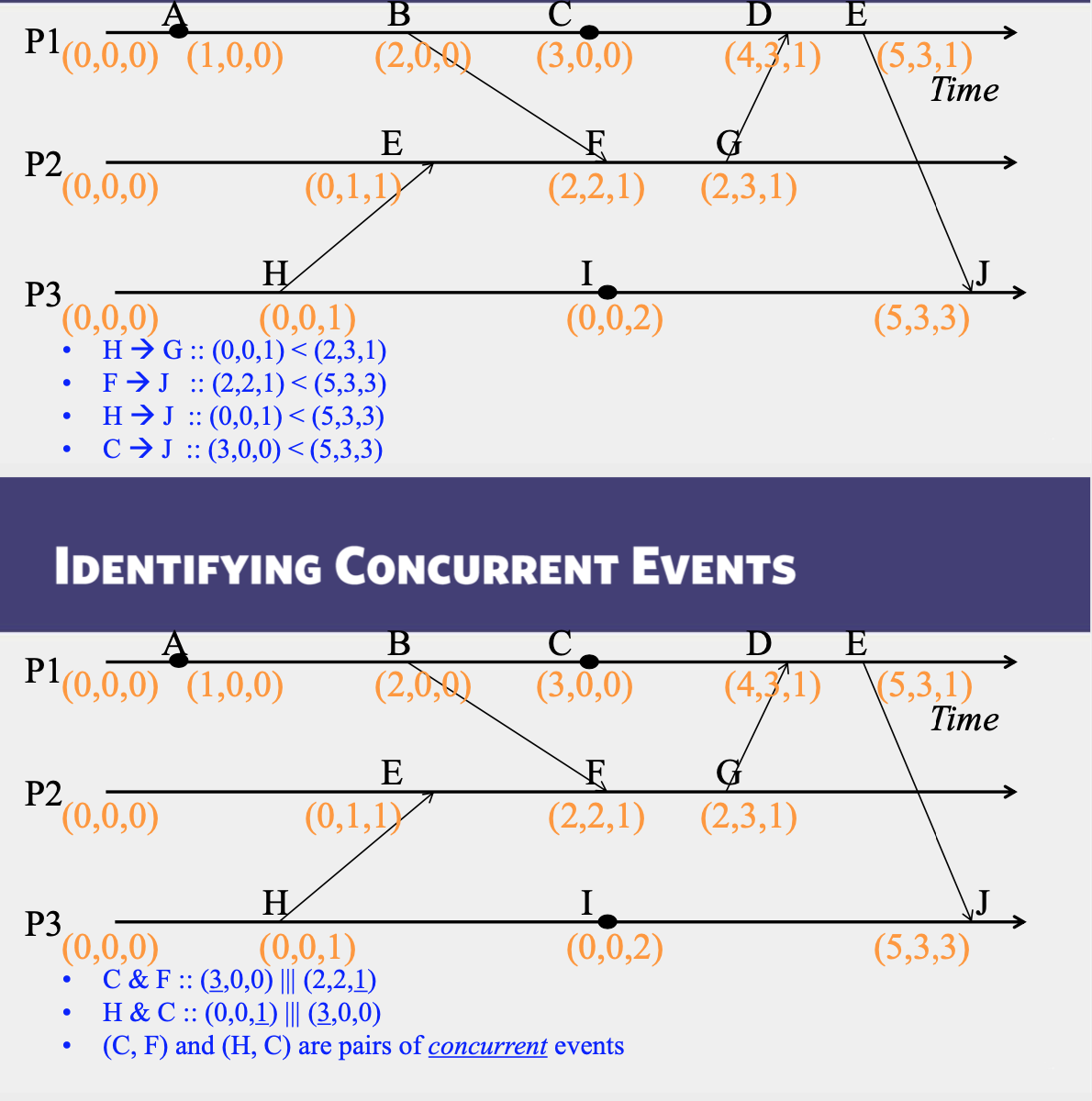
Concurrent Events
- A pair of concurrent events doesn’t have a causal path from one event to another (either way, in the pair)
- Lamport timestamps not guaranteed to be ordered or unequal for concurrent events
- Ok, since concurrent events are not causality related!
- Remember
1 | E1 -> E2 => timestamp(E1) < timestamp (E2), |
Vector timestamps
- Used in key-value stores like Riak
- Each process uses a vector of integer clocks
- Suppose there are N processes in the group 1...N
- Each vector has N elements
- Process i maintains vector Vi[1...N]
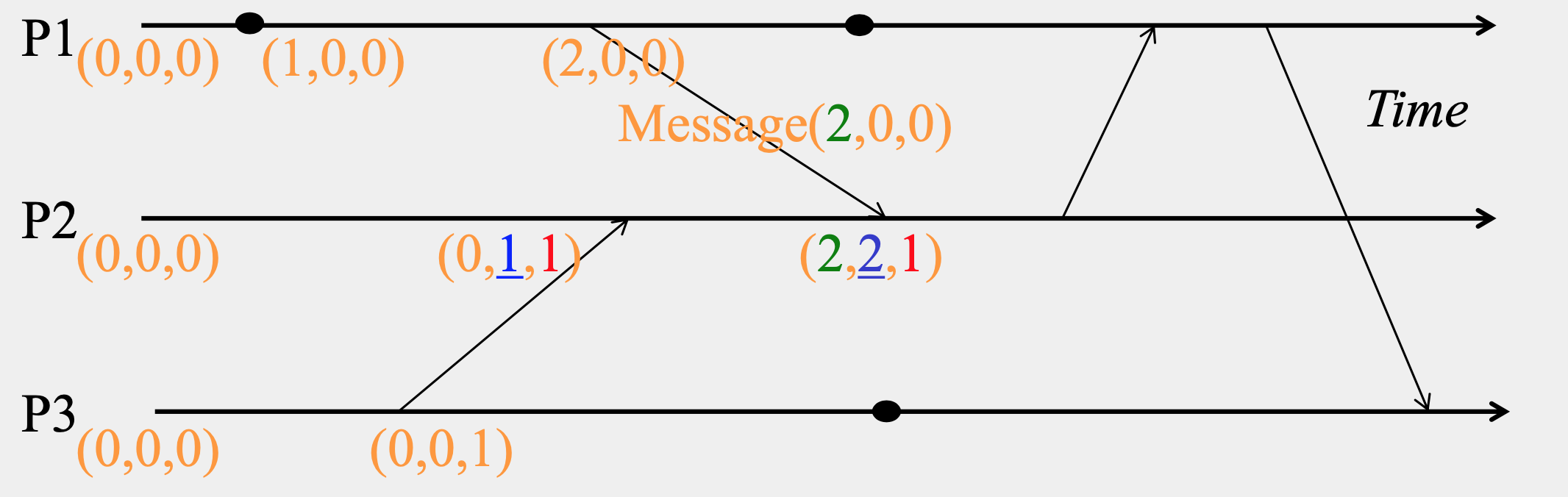
- \(j_{th}\) element of vector clock at process \(i\), \(V_i[j]\), is \(i’s\) knowledge of latest events at process \(j\)
Incrementing vector clocks
- On an instruction or send event at process \(i\), it increments only its \(i_{th}\) element of its vector clock.
- Each message carries the send-event’s vector timestamp V_{message}[1...N]
- On receiving a message at process \(i\):
\[ \begin{align*} &V_i[i] = V_i[i] + 1 \\ & V_i[j] = max(V_{message}[j], V_i[j]) \quad for \ quad j \neq i \\ \end{align*} \]
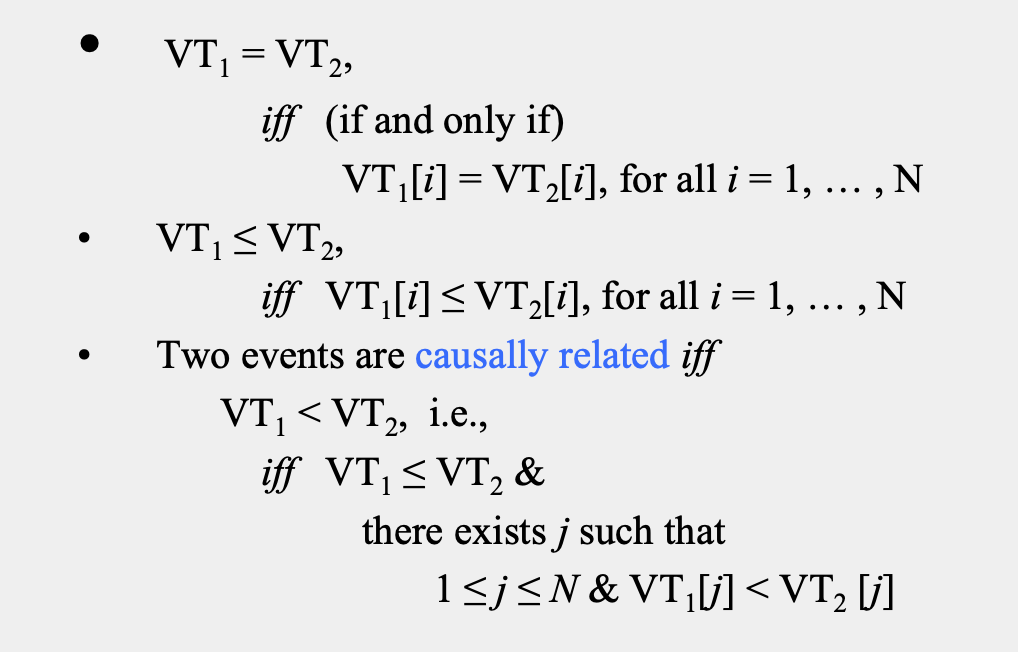
Causality
Reference
- https://lvsizhe.github.io/course/2018/09/time-in-distributed-systems-part1.html
- lecture slide from https://www.coursera.org/learn/cloud-computing/lecture/dy8wf/2-5-vector-clocks